
2023
Kofler, A.
Efficient Sampling from Differentiable Matrix Elements
Technical University of Munich, Germany, September 2023 (mastersthesis)
Spieler, A. M.
Intrinsic complexity and mechanisms of expressivity of cortical neurons
University of Tübingen, Germany, March 2023 (mastersthesis)
Qui, Z.
Towards Generative Machine Teaching
Technical University of Munich, Germany, February 2023 (mastersthesis)
Dittrich, A.
Generation and Quantification of Spin in Robot Table Tennis
University of Stuttgart, Germany, January 2023 (mastersthesis)
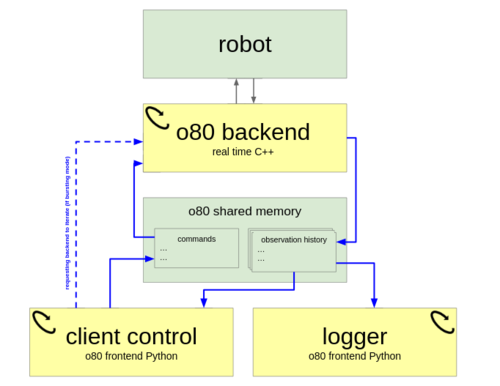
Berenz, V., Widmaier, F., Guist, S., Schölkopf, B., Büchler, D.
Synchronizing Machine Learning Algorithms, Realtime Robotic Control and Simulated Environment with o80
Robot Software Architectures Workshop (RSA) 2023, ICRA, 2023 (techreport)
2022
Liang, W.
Investigating Independent Mechanisms in Neural Networks
Université Paris-Saclay, France, October 2022 (mastersthesis)
Keidar, D.
Modeling subgroup differences in fMRI data: disentangling subgroup-specific responses from shared ones
ETH Zurich, Switzerland, October 2022 (mastersthesis)
Feil, M.
Multi-Target Multi-Object Manipulation using Relational Deep Reinforcement Learning
Technnical University Munich, Germany, September 2022 (mastersthesis)
Sliwa, J.
Independent Mechanism Analysis for High Dimensions
University of Tübingen, Germany, September 2022, (Graduate Training Centre of Neuroscience) (mastersthesis)
Dominguez-Olmedo, R.
On the Adversarial Robustness of Causal Algorithmic Recourse
University of Tübingen, Germany, August 2022 (mastersthesis)
Ghosh, S.
Independent Mechanism Analysis in High-Dimensional Observation Spaces
ETH Zurich, Switzerland, June 2022 (mastersthesis)
2021
Scherrer, N.
Learning Neural Causal Models with Active Interventions
ETH Zurich, Switzerland, November 2021 (mastersthesis)
Bing, S.
HealthGen: Conditional Generation of Realistic Medical Time Series with Informative Missingness
ETH Zurich, Switzerland, October 2021 (mastersthesis)
Lanzillotta, G.
Study of the Interventional Consistency of Autoencoders
ETH Zurich, Switzerland, October 2021 (mastersthesis)
Mambelli, D.
Training with Few to Manipulate Many. On OOD generalization in relational reinforcement learning
ETH Zurich, Switzerland, October 2021 (mastersthesis)
Belousov, B., H., A., Klink, P., Parisi, S., Peters, J.
Reinforcement Learning Algorithms: Analysis and Applications
883, Studies in Computational Intelligence, Springer International Publishing, 2021 (book)
2020
Ahmed, O.
A Robotic Manipulation Benchmark for Causal Structure and Transfer Learning
ETH Zurich, Switzerland, October 2020 (mastersthesis)
DuMont Schütte, A.
A Comprehensive Benchmark Evaluation of Synthetic Data Generation for Biomedical Imaging
ETH Zurich, Switzerland, October 2020 (mastersthesis)
Cacioppo, A.
Deep learning for the parameter estimation of tight-binding Hamiltonians
University of Roma, La Sapienza, Italy, May 2020 (mastersthesis)
Zecevic, M.
Learning Algorithms, Invariances, and the Real World
Technical University of Darmstadt, Germany, April 2020 (mastersthesis)
2019
Stimper, V.
Inferring the Band Structure from Band Mapping Data through Machine Learning
Technical University of Munich, September 2019 (mastersthesis)
Dietz, B.
Learning to Diagnose Diabetes from Magnetic Resonance Tomography
ETH Zurich, Switzerland, August 2019 (mastersthesis)
Li, G.
Reinforcement Learning for a Two-Robot Table Tennis Simulation
RWTH Aachen University, Germany, July 2019 (mastersthesis)
Konieczny, L.
Characteristics of longitudinal physiological measurements of late-stage ALS patients
Ludwig-Maximilians-Universität München, Germany, May 2019 (mastersthesis)
Xu, J.
Spatial Filtering based on Riemannian Manifold for Brain-Computer Interfacing
Technical University of Munich, Germany, 2019 (mastersthesis)
2018
Bustamante, S.
A virtual reality environment for experiments in assistive robotics and neural interfaces
Graduate School of Neural Information Processing, Eberhard Karls Universität Tübingen, Germany, 2018 (mastersthesis)
Gebhard, T.
On the Applicability of Machine Learning to Aid the Search for Gravitational Waves at the LIGO Experiment
Karlsruhe Institute of Technology, Germany, 2018 (mastersthesis)
Suter, R.
A Causal Perspective on Deep Representation Learning
ETH Zurich, 2018 (mastersthesis)
Lechner, T.
Domain Adaptation Under Causal Assumptions
Eberhard Karls Universität Tübingen, Germany, 2018 (mastersthesis)
Zabel, S.
Improving Tissue Differentiation based on Optical Emission Spectroscopy for Guided Electrosurgical Tumor Resection with Machine Learning
Eberhard Karls Universität Tübingen, Germany, 2018 (mastersthesis)
Guist, S.
Reinforcement Learning for High-Speed Robotics with Muscular Actuation
Ruprecht-Karls-Universität Heidelberg , 2018 (mastersthesis)
2017
Peters, J., Janzing, D., Schölkopf, B.
Elements of Causal Inference - Foundations and Learning Algorithms
Adaptive Computation and Machine Learning Series, The MIT Press, Cambridge, MA, USA, 2017 (book)
Emde, T.
Development and Evaluation of a Portable BCI System for Remote Data Acquisition
Graduate School of Neural Information Processing, Eberhard Karls Universität Tübingen, Germany, 2017 (mastersthesis)
Sücker, K.
Learning Optimal Configurations for Modeling Frowning by Transcranial Electrical Stimulation
Graduate School of Neural Information Processing, Eberhard Karls Universität Tübingen, Germany, 2017 (mastersthesis)
2015
Hohmann, M.
A Cognitive Brain-Computer Interface for Patients with Amyotrophic Lateral Sclerosis
Graduate Training Centre of Neuroscience, University of Tübingen, Germany, 2015 (mastersthesis)
Abbott, T., Abdalla, F. B., Allam, S., Amara, A., Annis, J., Armstrong, R., Bacon, D., Banerji, M., Bauer, A. H., Baxter, E., others,
Cosmology from Cosmic Shear with DES Science Verification Data
arXiv preprint arXiv:1507.05552, 2015 (techreport)
Jarvis, M., Sheldon, E., Zuntz, J., Kacprzak, T., Bridle, S. L., Amara, A., Armstrong, R., Becker, M. R., Bernstein, G. M., Bonnett, C., others,
The DES Science Verification Weak Lensing Shear Catalogs
arXiv preprint arXiv:1507.05603, 2015 (techreport)
Gao, M.
Sequential Image Deconvolution Using Probabilistic Linear Algebra
Technical University of Munich, Germany, 2015 (mastersthesis)
Casarsa de Azevedo, L.
Causal Inference in Neuroimaging
Graduate Training Centre of Neuroscience, University of Tübingen, Germany, 2015 (mastersthesis)
Ibarra Chaoul, A.
The effect of frowning on attention
Graduate Training Centre of Neuroscience, University of Tübingen, Germany, 2015 (mastersthesis)
2014
Kober, J., Peters, J.
Learning Motor Skills: From Algorithms to Robot Experiments
97, pages: 191, Springer Tracts in Advanced Robotics, Springer, 2014 (book)
Schultz, T., Nedjati-Gilani, G., Venkataraman, A., O’Donnell, L., Panagiotaki, E.
Computational Diffusion MRI and Brain Connectivity
pages: 255, Mathematics and Visualization, Springer, 2014 (book)
Shajarisales, N.
A Novel Causal Inference Method for Time Series
Eberhard Karls Universität Tübingen, Germany, Eberhard Karls Universität Tübingen, Germany, 2014 (mastersthesis)
Lacosse, E.
The Feasibility of Causal Discovery in Complex Systems: An Examination of Climate Change Attribution and Detection
Graduate Training Centre of Neuroscience, University of Tübingen, Germany, Graduate Training Centre of Neuroscience, University of Tübingen, Germany, 2014 (mastersthesis)
Huang, B.
Causal Discovery in the Presence of Time-Dependent Relations or Small Sample Size
Graduate Training Centre of Neuroscience, University of Tübingen, Germany, Graduate Training Centre of Neuroscience, University of Tübingen, Germany, 2014 (mastersthesis)
2013
Hennig, P.
Animating Samples from Gaussian Distributions
(8), Max Planck Institute for Intelligent Systems, Tübingen, Germany, 2013 (techreport)
Hogg, D. W., Angus, R., Barclay, T., Dawson, R., Fergus, R., Foreman-Mackey, D., Harmeling, S., Hirsch, M., Lang, D., Montet, B. T., Schiminovich, D., Schölkopf, B.
Maximizing Kepler science return per telemetered pixel: Detailed models of the focal plane in the two-wheel era
arXiv:1309.0653, 2013 (techreport)
Montet, B. T., Angus, R., Barclay, T., Dawson, R., Fergus, R., Foreman-Mackey, D., Harmeling, S., Hirsch, M., Hogg, D. W., Lang, D., Schiminovich, D., Schölkopf, B.
Maximizing Kepler science return per telemetered pixel: Searching the habitable zones of the brightest stars
arXiv:1309.0654, 2013 (techreport)
Schölkopf, B., Luo, Z., Vovk, V.
Empirical Inference - Festschrift in Honor of Vladimir N. Vapnik
Springer, 2013 (book)
2012
Zwießele, M.
Probabilistic Modelling of Expression Variation in Modern eQTL Studies
Eberhard Karls Universität Tübingen, Germany, October 2012 (mastersthesis)