Learning to Control Highly Accelerated Ballistic Movements on Muscular Robots
2023
Article
ei
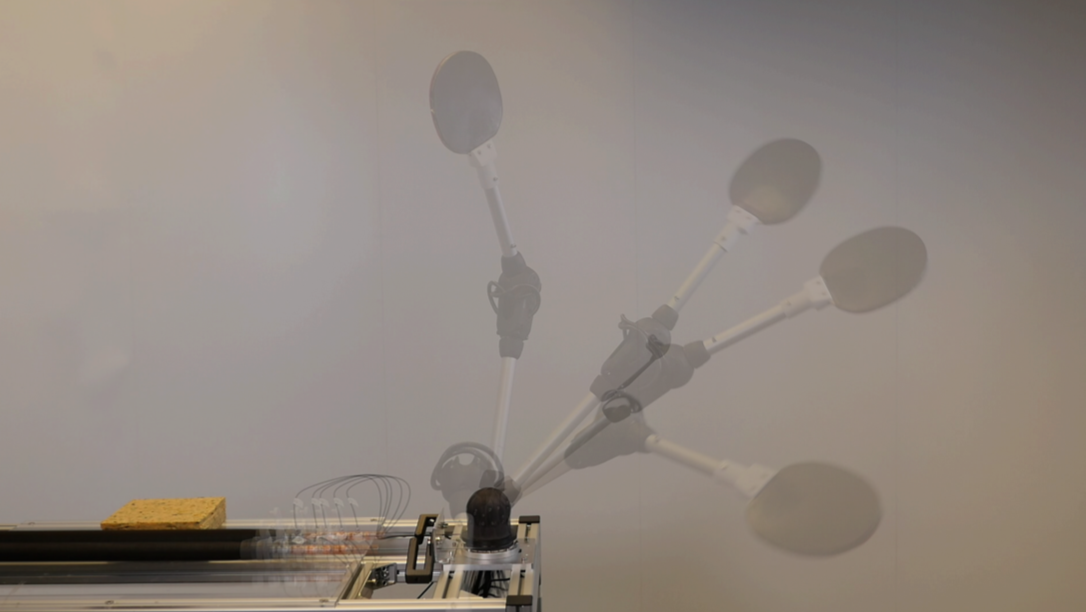
High-speed and high-acceleration movements are inherently hard to control. Applying learning to the control of such motions on anthropomorphic robot arms can improve the accuracy of the control but might damage the system. The inherent exploration of learning approaches can lead to instabilities and the robot reaching joint limits at high speeds. Having hardware that enables safe exploration of high-speed and high-acceleration movements is therefore desirable. To address this issue, we propose to use robots actuated by Pneumatic Artificial Muscles (PAMs). In this paper, we present a four degrees of freedom (DoFs) robot arm that reaches high joint angle accelerations of up to 28000 °/s^2 while avoiding dangerous joint limits thanks to the antagonistic actuation and limits on the air pressure ranges. With this robot arm, we are able to tune control parameters using Bayesian optimization directly on the hardware without additional safety considerations. The achieved tracking performance on a fast trajectory exceeds previous results on comparable PAM-driven robots. We also show that our system can be controlled well on slow trajectories with PID controllers due to careful construction considerations such as minimal bending of cables, lightweight kinematics and minimal contact between PAMs and PAMs with the links. Finally, we propose a novel technique to control the the co-contraction of antagonistic muscle pairs. Experimental results illustrate that choosing the optimal co-contraction level is vital to reach better tracking performance. Through the use of PAM-driven robots and learning, we do a small step towards the future development of robots capable of more human-like motions.
| Author(s): | Dieter Büchler and Roberto Calandra and Jan Peters |
| Journal: | Robotics and Autonomous Systems |
| Volume: | 159 |
| Year: | 2023 |
| Month: | January |
| Department(s): | Empirical Inference |
| Bibtex Type: | Article (article) |
| Paper Type: | Journal |
| DOI: | 10.1016/j.robot.2022.104230 |
| State: | Published |
| Links: |
Arxiv
Video |
| Video: | |
| Attachments: | |
|
BibTex @article{LCballisticMovements,
title = {Learning to Control Highly Accelerated Ballistic Movements on Muscular Robots},
author = {B{\"u}chler, Dieter and Calandra, Roberto and Peters, Jan},
journal = {Robotics and Autonomous Systems},
volume = {159},
month = jan,
year = {2023},
doi = {10.1016/j.robot.2022.104230},
month_numeric = {1}
}
|
|