
2024
Tsirtsis, S., Tabibian, B., Khajehnejad, M., Singla, A., Schölkopf, B., Gomez-Rodriguez, M.
Optimal Decision Making Under Strategic Behavior
Management Science, 2024, Published Online (article) In press
2023
Hupkes, D., Giulianelli, M., Dankers, V., Artetxe, M., Elazar, Y., Pimentel, T., Christodoulopoulos, C., Lasri, K., Saphra, N., Sinclair, A., Ulmer, D., Schottmann, F., Batsuren, K., Sun, K., Sinha, K., Khalatbari, L., Ryskina, M., Frieske, R., Cotterell, R., Jin, Z.
A taxonomy and review of generalization research in NLP
Nature Machine Intelligence, 5(10):1161-1174, October 2023 (article)
Hawkins-Hooker, A., Visonà, G., Narendra, T., Rojas-Carulla, M., Schölkopf, B., Schweikert, G.
Getting personal with epigenetics: towards individual-specific epigenomic imputation with machine learning
Nature Communications, 14(1), August 2023 (article)
Ortiz-Jimenez*, G., de Jorge*, P., Sanyal, A., Bibi, A., Dokania, P. K., Frossard, P., Rogez, G., Torr, P.
Catastrophic overfitting can be induced with discriminative non-robust features
Transactions on Machine Learning Research , July 2023, *equal contribution (article)
Kekić, A., Dehning, J., Gresele, L., von Kügelgen, J., Priesemann, V., Schölkopf, B.
Evaluating vaccine allocation strategies using simulation-assisted causal modeling
Patterns, 4(6), June 2023 (article)
Katiyar, P., Schwenck, J., Frauenfeld, L., Divine, M. R., Agrawal, V., Kohlhofer, U., Gatidis, S., Kontermann, R., Königsrainer, A., Quintanilla-Martinez, L., la Fougère, C., Schölkopf, B., Pichler, B. J., Disselhorst, J. A.
Quantification of intratumoural heterogeneity in mice and patients via machine-learning models trained on PET–MRI data
Nature Biomedical Engineering, 7(8):1014-1027, June 2023 (article)
Gatidis, S., Kart, T., Fischer, M., Winzeck, S., Glocker, B., Bai, W., Bülow, R., Emmel, C., Friedrich, L., Kauczor, H., Keil, T., Kröncke, T., Mayer, P., Niendorf, T., Peters, A., Pischon, T., Schaarschmidt, B., Schmidt, B., Schulze, M., Umutle, L., Völzke, H., Küstner, T., Bamberg, F., Schölkopf, B., Rueckert, D.
Better Together: Data Harmonization and Cross-StudAnalysis of Abdominal MRI Data From UK Biobank and the German National Cohort
Investigative Radiology, 58(5):346-354, May 2023 (article)
Mineeva*, O., Danciu*, D., Schölkopf, B., Ley, R. E., Rätsch, G., Youngblut, N. D.
ResMiCo: Increasing the quality of metagenome-assembled genomes with deep learning
PLOS Computational Biology, 19(5), Public Library of Science, May 2023, *equal contribution (article)
Safavi, S., Panagiotaropoulos, T. I., Kapoor, V., Ramirez-Villegas, J. F., Logothetis, N., Besserve, M.
Uncovering the Organization of Neural Circuits with Generalized Phase Locking Analysis
PLOS Computational Biology, 19(4):1-45, Public Library of Science, April 2023 (article)
Schreiber*, J., Boix*, C., Lee, J. W., Li, H., Guan, Y., Chang, C., Chang, J., Hawkins-Hooker, A., Schölkopf, B., Schweikert, G., Carulla, M. R., Canakoglu, A., Guzzo, F., Nanni, L., Masseroli, M., Carman, M. J., Pinoli, P., Hong, C., Yip, K. Y., Spence, J. P., Batra, S. S., Song, Y. S., Mahony, S., Zhang, Z., Tan, W., Shen, Y., Sun, Y., Shi, M., Adrian, J., Sandstrom, R., Farrell, N., Halow, J., Lee, K., Jiang, L., Yang, X., Epstein, C., Strattan, J. S., Bernstein, B., Snyder, M., Kellis, M., Stafford, W., Kundaje, A., ENCODE Imputation Challenge Participants,
The ENCODE Imputation Challenge: a critical assessment of methods for cross-cell type imputation of epigenomic profiles
Genome Biology, 24, April 2023, *co‑first authors (article)
Wildberger, J., Dax, M., Green, S. R., Gair, J., Pürrer, M., Macke, J. H., Buonanno, A., Schölkopf, B.
Adapting to noise distribution shifts in flow-based gravitational-wave inference
Physical Review D, 107(8), April 2023 (article)
Dax, M., Green, S. R., Gair, J., Pürrer, M., Wildberger, J., Macke, J. H., Buonanno, A., Schölkopf, B.
Neural Importance Sampling for Rapid and Reliable Gravitational-Wave Inference
Physical Review Letters, 130(17), April 2023 (article)
Zhang, R., Imaizumi, M., Schölkopf, B., Muandet, K.
Instrumental variable regression via kernel maximum moment loss
Journal of Causal Inference, 11(1), April 2023 (article)
Athanassiadis, A. G., Schlieder, L., Melde, K., Volchkov, V., Schölkopf, B., Fischer, P.
Multiplane Diffractive Acoustic Networks
IEEE Transactions on Ultrasonics, Ferroelectrics, and Frequency Control, 70(5):441-448, IEEE, March 2023 (article)
Gupta, P., Maharaj, T., Weiss, M., Rahaman, N., Alsdurf, H., Minoyan, N., Harnois-Leblanc, S., Merckx, J., Williams, A., Schmidt, V., St-Charles, P., Patel, A., Zhang, Y., Buckeridge, D. L., Pal, C., Schölkopf, B., Bengio, Y.
Proactive Contact Tracing
PLOS Digital Health, 2(3):1-19, March 2023 (article)
Fischer, M., Hepp, T., Gatidis, S., Yang, B.
Self-supervised contrastive learning with random walks for medical image segmentation with limited annotations
Computerized Medical Imaging and Graphics, 104, March 2023 (article)
Dangel*, F., Tatzel*, L., Hennig, P.
ViViT: Curvature Access Through The Generalized Gauss-Newton’s Low-Rank Structure
Transactions on Machine Learning Research, February 2023, *equal contribution (article)
Choe, J., Oh, S. J., Chun, S., Lee, S., Akata, Z., Shim, H.
Evaluation for Weakly Supervised Object Localization: Protocol, Metrics, and Datasets
IEEE Transactions on Pattern Analysis and Machine Intelligence, 45(2):1732-1748, February 2023 (article)
Liu, W., Wen, Y., Raj, B., Singh, R., Weller, A.
SphereFace Revived: Unifying Hyperspherical Face Recognition
IEEE Transactions on Pattern Analysis and Machine Intelligence, 45(2):2458-2474, February 2023 (article)
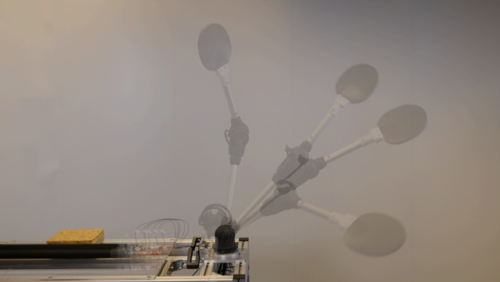
Büchler, D., Calandra, R., Peters, J.
Learning to Control Highly Accelerated Ballistic Movements on Muscular Robots
Robotics and Autonomous Systems, 159, January 2023 (article)
Mehrjou, A., Iannelli, A., Schölkopf, B.
Learning Dynamical Systems using Local Stability Priors
Journal of Computational Dynamics, 10(1):175-198, January 2023, Special issue "Computation of Lyapunov functions and contraction metrics" (article)
Mehrjou*, A., Soleymani*, A., Abyaneh, A., Bhatt, S., Schölkopf, B., Bauer, S.
Pyfectious: An individual-level simulator to discover optimal containment policies for epidemic diseases
PLOS Computational Biology, 19(1):1-41, January 2023, *equal contribution (article)
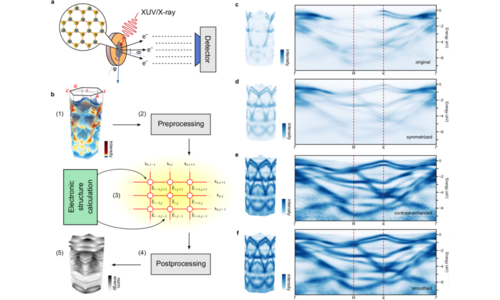
Xian*, R. P., Stimper*, V., Zacharias, M., Dendzik, M., Dong, S., Beaulieu, S., Schölkopf, B., Wolf, M., Rettig, L., Carbogno, C., Bauer, S., Ernstorfer, R.
A machine learning route between band mapping and band structure
Nature Computational Science, 3(1):101-114, January 2023, *equal contribution (article)
Shao, K., Logothetis, N. K., Besserve, M.
Information theoretic measures of causal influences during transient neural events
Frontiers in Network Physiology, 3, 2023 (article)
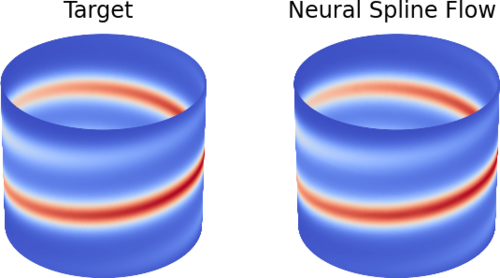
Stimper, V., Liu, D., Campbell, A., Berenz, V., Ryll, L., Schölkopf, B., Hernández-Lobato, J. M.
normflows: A PyTorch Package for Normalizing Flows
Journal of Open Source Software, 8(86):5361, The Journal of Open Source Software, 2023 (article)
Melde, K., Kremer, H., Shi, M., Seneca, S., Frey, C., Platzman, I., Degel, C., Schmitt, D., Schölkopf, B., Fischer, P.
Compact holographic sound fields enable rapid one-step assembly of matter in 3D
Science Advances, 9(6), 2023 (article)
Simon-Gabriel, C., Barp, A., Schölkopf, B., Mackey, L.
Metrizing Weak Convergence with Maximum Mean Discrepancies
Journal of Machine Learning Research, 24, 2023 (article)
2022
Xian, Y., Korbar, B., Douze, M., Torresani, L., Schiele, B., Akata, Z.
Generalized Few-Shot Video Classification With Video Retrieval and Feature Generation
IEEE Transactions on Pattern Analysis and Machine Intelligence, 44(12):8949-8961, December 2022 (article)
Karimi, A., Barthe, G., Schölkopf, B., Valera, I.
A survey of algorithmic recourse: contrastive explanations and consequential recommendations
ACM Computing Surveys, 55(5), Association for Computing Machinery (ACM), December 2022 (article)
Monsees, A., Voit, K., Wallace, D. J., Sawinski, J., Charyasz, E., Scheffler, K., Macke, J. H., Kerr, J. N. D.
Estimation of skeletal kinematics in freely moving rodents
Nature Methods, 19(11):1500-1509, November 2022 (article)
Lorch, L., Kremer, H., Trouleau, W., Tsirtsis, S., Szanto, A., Schölkopf, B., Gomez-Rodriguez, M.
Quantifying the effects of contact tracing, testing, and containment measures in the presence of infection hotspots
ACM Transactions on Spatial Algorithms and Systems, 8(4):article no. 25, November 2022 (article)
Kart, T., Fischer, M., Winzeck, S., Glocker, B., Bai, W., Bülow, R., Emmel, C., Friedrich, L., Kauczor, H. U. K. T., Kröncke, T., Mayer, P., Niendorf, T., Peters, A., Pischon, T., Schaarschmidt, B. M., Schmidt, B., Schulze, M. B., Umutle, L., Völzke, H., Küstner, T., Bamberg, F., Schölkopf, B., Rueckert, D., Gatidis, S.
Automated imaging-based abdominal organ segmentation and quality control in 20,000 participants of the UK Biobank and German National Cohort Studies
Scientific Reports, 12(1):article no. 18733, November 2022 (article)
Gatidis, S., Hebb, T., Frueh, M., La Fougère, C., Nikolaou, K., Pfannenberg, C., Schölkopf, B., Kuestner, T., Cyran, C., Rubin, D.
A whole-body FDG-PET/CT Dataset with manually annotated Tumor Lesions
Scientific Data, 9(1), October 2022 (article)
Shahrokhshahi, A., Khadiv, M., Taherifar, A., Mansouri, S., Park, E. J., Arzanpour, S.
Sample-Efficient Policy Adaptation for Exoskeletons Under Variations in the Users and the Environment
IEEE Robotics and Automation Letters, 7(4):9020-9027, October 2022 (article)
Frueh, M., Kuestner, T., Nachbar, M., Thorwarth, D., Schilling, A., Gatidis, S.
Self-supervised learning for automated anatomical tracking in medical image data with minimal human labeling effort
Computer Methods and Programs in Biomedicine, 225, pages: 107085, October 2022 (article)
Eilers, A., Hogg, D. W., Schölkopf, B., Foreman-Mackey, D., Davies, F. B., Schindler, J.
A Generative Model for Quasar Spectra
The Astrophysical Journal, 938(1), The American Astronomical Society, October 2022 (article)
Soleymani*, A., Raj*, A., Bauer, S., Schölkopf, B., Besserve, M.
Causal Feature Selection via Orthogonal Search
Transactions on Machine Learning Research, September 2022, *equal contribution (article)
Deistler, M., Macke, J. H., Gonçalves, P. J.
Energy-efficient network activity from disparate circuit parameters
Proceedings of the National Academy of Sciences, 119(44), September 2022 (article)
Chen, Y., Mancini, M., Zhu, X., Akata, Z.
Semi-Supervised and Unsupervised Deep Visual Learning: A Survey
IEEE Transactions on Pattern Analysis and Machine Intelligence, August 2022, *early access (article)
Frueh, M., Schilling, A., Gatidis, S., Kuestner, T.
Real Time Landmark Detection for Within- and Cross Subject Tracking With Minimal Human Supervision
IEEE Access, 10, pages: 81192-81202, August 2022 (article)
Chen, W., Horváth, S., Richtárik, P.
Optimal Client Sampling for Federated Learning
Transactions on Machine Learning Research, August 2022 (article)
Bogdanovic, M., Khadiv, M., Righetti, L.
Model-free reinforcement learning for robust locomotion using demonstrations from trajectory optimization
Frontiers in Robotics and AI, 9, August 2022 (article)
Oesterle, J., Krämer, N., P., H., Berens, P.
Probabilistic solvers enable a straight-forward exploration of numerical uncertainty in neuroscience models
Journal of Computational Neuroscience, 50(4):485-503, August 2022 (article)
Bing, S., Dittadi, A., Bauer, S., Schwab, P.
Conditional Generation of Medical Time Series for Extrapolation to Underrepresented Populations
PLOS Digital Health, 1(7):e0000074, July 2022 (article)
Boelts, J., Lueckmann, J., Gao, R., Macke, J. H.
Flexible and efficient simulation-based inference for models of decision-making
eLife, 11, pages: e77220, eLife Sciences Publications, Ltd, July 2022 (article)
Quirin, M., Loktyushin, A., Küstermann, E., Kuhl, J.
The Achievement Motive in the Brain: BOLD Responses to Pictures of Challenging Activities Predicted by Implicit Versus Explicit Achievement Motives
Frontiers in Psychology, 13, pages: 845910, July 2022 (article)
Hepp, T., Kalmbach, L., Kolb, M., Martirosian, P., Hilbert, T., Thaiss, W. M., Notohamiprodjo, M., Bedke, J., Nikolaou, K., Stenzl, A., Kruck, S., Kaufmann, S.
T2 mapping for the characterization of prostate lesions
World Journal of Urology, 40(6):1455–1461, June 2022 (article)
Peisen, F., Hänsch, A., Hering, A., Brendlin, A. S., Afat, S., Nikolaou, K., Gatidis, S., Eigentler, T., Amaral, T., Moltz, J. H., Othman, A. E.
Combination of Whole-Body Baseline CT Radiomics and Clinical Parameters to Predict Response and Survival in a Stage-IV Melanoma Cohort Undergoing Immunotherapy
Cancers, 14(12):2992, June 2022 (article)
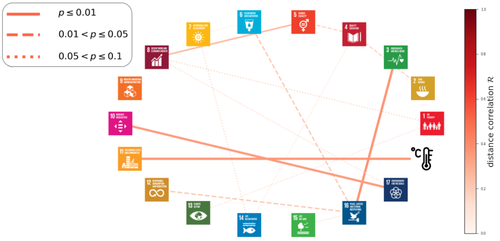
Laumann, F., von Kügelgen, J., Kanashiro Uehara, T. H., Barahona, M.
Complex interlinkages, key objectives and nexuses amongst the Sustainable Development Goals and climate change: a network analysis
The Lancet Planetary Health, 6(5):e422-e430, May 2022 (article)
Hattori, S., Foreman-Mackey, D., Hogg, D. W., Montet, B. T., Angus, R., Pritchard, T. A., Curtis, J. L., Schölkopf, B.
The unpopular Package: A Data-driven Approach to Detrending TESS Full-frame Image Light Curves
The Astronomical Journal, 163(6):article no. 284, May 2022 (article)